
EFFOORTT
DownloadTélécharger
Actions
Vote :
ScreenshotAperçu
Informations
Catégorie :Category: mViewer GX Creator Lua TI-Nspire
Auteur Author: MEDBEN
Type : Classeur 3.6
Page(s) : 2
Taille Size: 267.31 Ko KB
Mis en ligne Uploaded: 17/04/2021 - 18:50:41
Uploadeur Uploader: MEDBEN (Profil)
Téléchargements Downloads: 25
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a2725416
Type : Classeur 3.6
Page(s) : 2
Taille Size: 267.31 Ko KB
Mis en ligne Uploaded: 17/04/2021 - 18:50:41
Uploadeur Uploader: MEDBEN (Profil)
Téléchargements Downloads: 25
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a2725416
Description
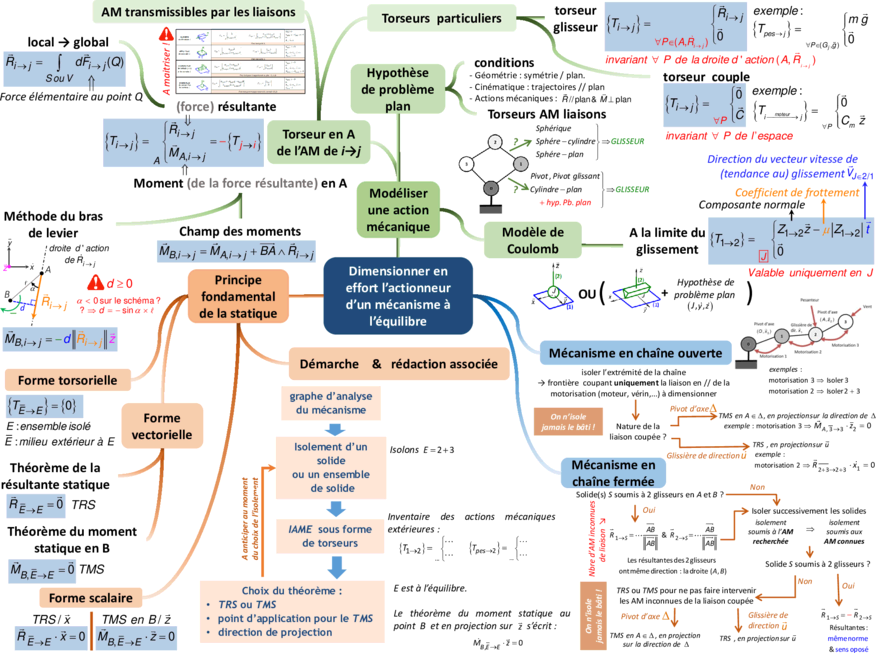
AM transmissibles par les liaisons torseur Ri → j exemple :
glisseur Ti → j =
Torseurs particuliers m g
pes → j
T =
local → global P ( A,Ri → j ) 0 P(G j ,g ) 0
A maitriser !
Ri → j = dFi → j (Q )
Hypothèse
conditions invariant P de la droite d ' action ( A, R i → j )
- Géométrie : symétrie / plan. torseur couple
S ou V
de problème - Cinématique : trajectoires // plan
0 exemple :
Force élémentaire au point Q
(force) résultante plan
- Actions mécaniques : R // plan& M ⊥ plan
Ti → j = Ti ⎯⎯⎯⎯ =
0
P
Torseurs AM liaisons C moteur
→j
P Cm z
Ri → j Sphérique
Ti → j = = − T j →i Torseur en A
de l’AM de i→j
?
Sphére − cylindre GLISSEUR
invariant P de l ’espace
M Sphére − plan
A A,i → j Direction du vecteur vitesse de
Pivot , Pivot glissant (tendance au) glissement VJ2/1
Moment (de la force résultante) en A ? Cylindre − plan
GLISSEUR
Modéliser Coefficient de frottement
+ hyp. Pb. plan Composante normale
Méthode du bras une action
de levier Champ des moments mécanique Modèle de A la limite du T = Z1→ 2 z − Z1→2 t
y 1→ 2
droite d ' action MB,i → j = M A,i → j + BA Ri → j Coulomb glissement J 0
de Ri → j
z x A Dimensionner en Valable uniquement en J
...
glisseur Ti → j =
Torseurs particuliers m g
pes → j
T =
local → global P ( A,Ri → j ) 0 P(G j ,g ) 0
A maitriser !
Ri → j = dFi → j (Q )
Hypothèse
conditions invariant P de la droite d ' action ( A, R i → j )
- Géométrie : symétrie / plan. torseur couple
S ou V
de problème - Cinématique : trajectoires // plan
0 exemple :
Force élémentaire au point Q
(force) résultante plan
- Actions mécaniques : R // plan& M ⊥ plan
Ti → j = Ti ⎯⎯⎯⎯ =
0
P
Torseurs AM liaisons C moteur
→j
P Cm z
Ri → j Sphérique
Ti → j = = − T j →i Torseur en A
de l’AM de i→j
?
Sphére − cylindre GLISSEUR
invariant P de l ’espace
M Sphére − plan
A A,i → j Direction du vecteur vitesse de
Pivot , Pivot glissant (tendance au) glissement VJ2/1
Moment (de la force résultante) en A ? Cylindre − plan
GLISSEUR
Modéliser Coefficient de frottement
+ hyp. Pb. plan Composante normale
Méthode du bras une action
de levier Champ des moments mécanique Modèle de A la limite du T = Z1→ 2 z − Z1→2 t
y 1→ 2
droite d ' action MB,i → j = M A,i → j + BA Ri → j Coulomb glissement J 0
de Ri → j
z x A Dimensionner en Valable uniquement en J
...


, reçois gratuitement 1 exemplaire de test de la TI-82 Advanced Edition Python. À demander d'ici le 31 décembre 2024.")





