
mécanique
DownloadTélécharger
Actions
Vote :
ScreenshotAperçu
Informations
Catégorie :Category: mViewer GX Creator Lua TI-Nspire
Auteur Author: best
Type : Classeur 3.6
Page(s) : 107
Taille Size: 11.65 Mo MB
Mis en ligne Uploaded: 14/03/2021 - 18:46:54
Uploadeur Uploader: suila2112 (Profil)
Téléchargements Downloads: 16
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a2710248
Type : Classeur 3.6
Page(s) : 107
Taille Size: 11.65 Mo MB
Mis en ligne Uploaded: 14/03/2021 - 18:46:54
Uploadeur Uploader: suila2112 (Profil)
Téléchargements Downloads: 16
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a2710248
Description
! !
! !
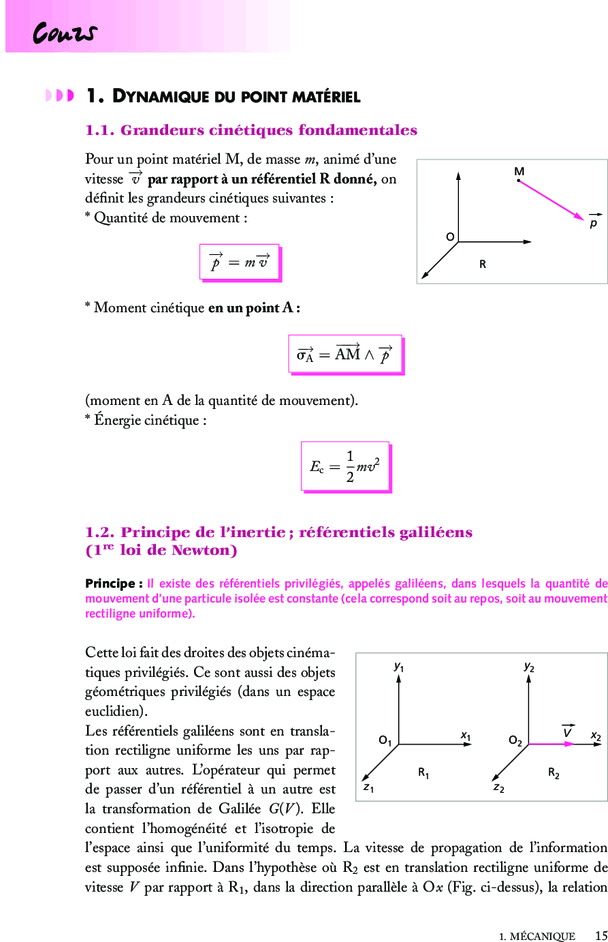
1. DYNAMIQUE DU POINT MATÉRIEL
1.1. Grandeurs cinétiques fondamentales
Pour un point matériel M, de masse m, animé d’une
M
vitesse −
→v par rapport à un référentiel R donné, on
définit les grandeurs cinétiques suivantes :
* Quantité de mouvement : p
O
−
→
p = m−
→
v R
* Moment cinétique en un point A :
− −−→ −
→
s→
A = AM ∧ p
(moment en A de la quantité de mouvement).
* Énergie cinétique :
1 2
Ec = mv
2
1.2. Principe de l’inertie ; référentiels galiléens
(1re loi de Newton)
Principe : Il existe des référentiels privilégiés, appelés galiléens, dans lesquels la quantité de
mouvement d’une particule isolée est constante (cela correspond soit au repos, soit au mouvement
rectiligne uniforme).
Cette loi fait des droites des objets cinéma-
y1 y2
tiques privilégiés. Ce sont aussi des objets
géométriques privilégiés (dans un espace
euclidien).
Les référentiels galiléens sont en transla- x1 V x2
O1 O2
tion rectiligne uniforme les uns par rap-
port aux autres. L’opérateur qui permet R1 R2
de passer d’un référentiel à un autre est z1 z2
la transformation de Galilée G(V ). Elle
contient l’homogénéité et l’isotropie de
l’espace ainsi que l’uniformité du temps. La vitesse de propagation de l’information
est supposée infinie. Dans l’hypothèse où R2 est en translation rectiligne uniforme de
vitesse V par rapport à R1 , dans la direction parallèle à Ox (Fig. ci-dessus), la relation
1. MÉCANIQUE 15
! !
! !
! !
! !
entre les deux référentiels s’écrit (dans les repères définis par les origines O1 , O2 et les
trois axes de directions fixes associés) :
x1 1 0 0 V x2
y1 0 1 0 0 y2
=
z1 0 0 1 0 z2
t1 0 0 0 1 t2
Matriciellement, cette relation s’écrit :
' −→(
[X1 ] = G( V ) [X2 ]
)' → (*
−
Il est facile de montrer que l’ensemble G( V ) des transformations de Galilée a une
structure de groupe :
' −→( ' − → ( ' − → ( −
→ − → − →
G( V ) ⊗ G( V ! ) = G( V " ) où V !! = V 1 V !
Les lois de la mécanique classique sont invariantes dans les transformations du groupe
de Galilée.
1.3. Principe fondamental de la dynamique. Référentiels
galiléens (2e loi de Newton)
Principe : Dans un référentiel galiléen, la dérivée de la quantité de mouvement d’un point matériel
par rapport au temps est égale à la somme des forces qu’il subit.
! − →" #−
dp →
= f
dt Rgal
Dans un autre référentiel galiléen, le principe fondamental appliqué à ce point s’écrit
exactement de la même façon, puisque deux référentiels galiléens ne sont pas accélérés
l’un par rapport à l’autre. +− →
Dans le cas où la masse du point est constante, ce principe s’écrit m−
→
a = f
1.4. Principe des actions réciproques (3e loi de Newton)
−−→
Principe : Si un point matériel 1 exerce sur un point matériel 2 une force F1→2 , alors le point
−−→ −−→
matériel 2 exerce sur 1 une force opposée F2→1 = −F1→2
Cette loi suppose une transmission instantanée de l’information. Ainsi, le principe des
actions réciproques n’est-il plus valable dans le cadre de la théorie de la relativité restreinte.
16
! !
! !
! !
! !
1.5. Principe fondamental de la dynamique. Cas des référentiels
non galiléens
• R2 est en translation par rapport à R1
y1 y2 M
(translation non rectiligne uniforme).
Principe : Le principe fondamental de la
dynamique dans R2 non galiléen s’écrit :
O1 x1 O2 x2
! →
−" #−
dp → − →
= f 1 fie (M)
dt R2
z1 R1 z2 R2
−
→ Galiléen en translation non
fie (M) est la force d’inertie d’entraînement du rectiligne uniforme
point M due à l’accélération de R2 par rapport par rapport à R1
à R1 galiléen.
Dans le cas d’une translation, l’accélération d’entraînement du point M ne dépend ni de
sa position par rapport à R2 ni de sa vitesse par rapport à R2 et on a :
, −−−→ -
−
→ d2 O1 O2
fie (M) = −m−
→
ae (M) = −m−
→
a (R2 /R1 ) = −m
dt 2
où −
→
a (R2 /R1 ) est l’accélération de R2 dans sa translation par rapport à R1 .
• R2 est en rotation autour d’un axe par rap-
R1 z
port à R1 1
H
Principe : ...
! !
1. DYNAMIQUE DU POINT MATÉRIEL
1.1. Grandeurs cinétiques fondamentales
Pour un point matériel M, de masse m, animé d’une
M
vitesse −
→v par rapport à un référentiel R donné, on
définit les grandeurs cinétiques suivantes :
* Quantité de mouvement : p
O
−
→
p = m−
→
v R
* Moment cinétique en un point A :
− −−→ −
→
s→
A = AM ∧ p
(moment en A de la quantité de mouvement).
* Énergie cinétique :
1 2
Ec = mv
2
1.2. Principe de l’inertie ; référentiels galiléens
(1re loi de Newton)
Principe : Il existe des référentiels privilégiés, appelés galiléens, dans lesquels la quantité de
mouvement d’une particule isolée est constante (cela correspond soit au repos, soit au mouvement
rectiligne uniforme).
Cette loi fait des droites des objets cinéma-
y1 y2
tiques privilégiés. Ce sont aussi des objets
géométriques privilégiés (dans un espace
euclidien).
Les référentiels galiléens sont en transla- x1 V x2
O1 O2
tion rectiligne uniforme les uns par rap-
port aux autres. L’opérateur qui permet R1 R2
de passer d’un référentiel à un autre est z1 z2
la transformation de Galilée G(V ). Elle
contient l’homogénéité et l’isotropie de
l’espace ainsi que l’uniformité du temps. La vitesse de propagation de l’information
est supposée infinie. Dans l’hypothèse où R2 est en translation rectiligne uniforme de
vitesse V par rapport à R1 , dans la direction parallèle à Ox (Fig. ci-dessus), la relation
1. MÉCANIQUE 15
! !
! !
! !
! !
entre les deux référentiels s’écrit (dans les repères définis par les origines O1 , O2 et les
trois axes de directions fixes associés) :
x1 1 0 0 V x2
y1 0 1 0 0 y2
=
z1 0 0 1 0 z2
t1 0 0 0 1 t2
Matriciellement, cette relation s’écrit :
' −→(
[X1 ] = G( V ) [X2 ]
)' → (*
−
Il est facile de montrer que l’ensemble G( V ) des transformations de Galilée a une
structure de groupe :
' −→( ' − → ( ' − → ( −
→ − → − →
G( V ) ⊗ G( V ! ) = G( V " ) où V !! = V 1 V !
Les lois de la mécanique classique sont invariantes dans les transformations du groupe
de Galilée.
1.3. Principe fondamental de la dynamique. Référentiels
galiléens (2e loi de Newton)
Principe : Dans un référentiel galiléen, la dérivée de la quantité de mouvement d’un point matériel
par rapport au temps est égale à la somme des forces qu’il subit.
! − →" #−
dp →
= f
dt Rgal
Dans un autre référentiel galiléen, le principe fondamental appliqué à ce point s’écrit
exactement de la même façon, puisque deux référentiels galiléens ne sont pas accélérés
l’un par rapport à l’autre. +− →
Dans le cas où la masse du point est constante, ce principe s’écrit m−
→
a = f
1.4. Principe des actions réciproques (3e loi de Newton)
−−→
Principe : Si un point matériel 1 exerce sur un point matériel 2 une force F1→2 , alors le point
−−→ −−→
matériel 2 exerce sur 1 une force opposée F2→1 = −F1→2
Cette loi suppose une transmission instantanée de l’information. Ainsi, le principe des
actions réciproques n’est-il plus valable dans le cadre de la théorie de la relativité restreinte.
16
! !
! !
! !
! !
1.5. Principe fondamental de la dynamique. Cas des référentiels
non galiléens
• R2 est en translation par rapport à R1
y1 y2 M
(translation non rectiligne uniforme).
Principe : Le principe fondamental de la
dynamique dans R2 non galiléen s’écrit :
O1 x1 O2 x2
! →
−" #−
dp → − →
= f 1 fie (M)
dt R2
z1 R1 z2 R2
−
→ Galiléen en translation non
fie (M) est la force d’inertie d’entraînement du rectiligne uniforme
point M due à l’accélération de R2 par rapport par rapport à R1
à R1 galiléen.
Dans le cas d’une translation, l’accélération d’entraînement du point M ne dépend ni de
sa position par rapport à R2 ni de sa vitesse par rapport à R2 et on a :
, −−−→ -
−
→ d2 O1 O2
fie (M) = −m−
→
ae (M) = −m−
→
a (R2 /R1 ) = −m
dt 2
où −
→
a (R2 /R1 ) est l’accélération de R2 dans sa translation par rapport à R1 .
• R2 est en rotation autour d’un axe par rap-
R1 z
port à R1 1
H
Principe : ...


, reçois gratuitement 1 exemplaire de test de la TI-82 Advanced Edition Python. À demander d'ici le 31 décembre 2024.")





