
Laplace
DownloadTélécharger
Actions
Vote :
ScreenshotAperçu
Informations
Catégorie :Category: mViewer GX Creator Lua TI-Nspire
Auteur Author: mcboulba
Type : Classeur 3.6
Page(s) : 10
Taille Size: 797.06 Ko KB
Mis en ligne Uploaded: 29/01/2021 - 18:23:42
Uploadeur Uploader: mcboulba (Profil)
Téléchargements Downloads: 21
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a2694656
Type : Classeur 3.6
Page(s) : 10
Taille Size: 797.06 Ko KB
Mis en ligne Uploaded: 29/01/2021 - 18:23:42
Uploadeur Uploader: mcboulba (Profil)
Téléchargements Downloads: 21
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a2694656
Description
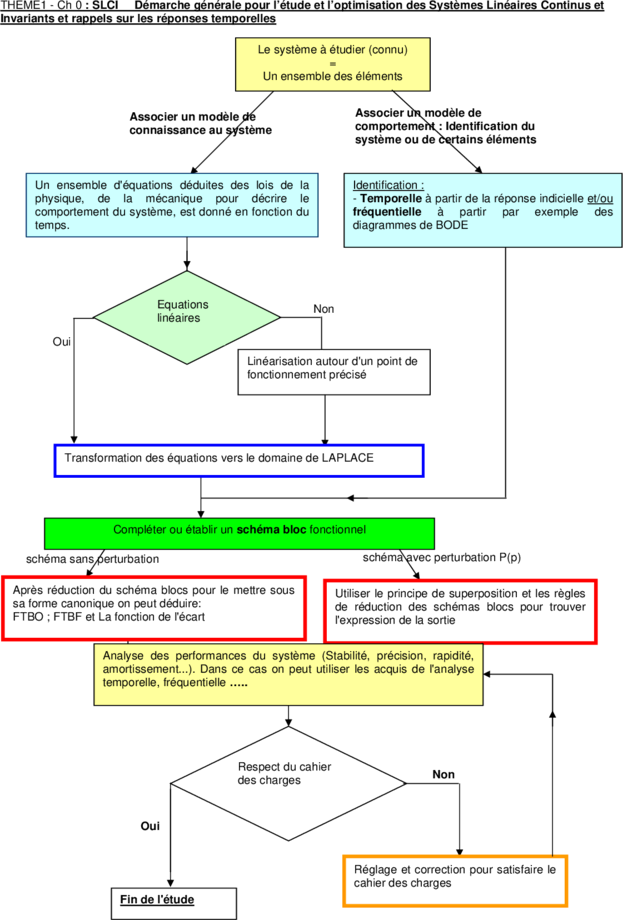
THEME1 - Ch 0 : SLCI Démarche générale pour l’étude et l’optimisation des Systèmes Linéaires Continus et
Invariants et rappels sur les réponses temporelles
Le système à étudier (connu)
=
Un ensemble des éléments
Associer un modèle de Associer un modèle de
connaissance au système comportement : Identification du
système ou de certains éléments
Un ensemble d'équations déduites des lois de la Identification :
physique, de la mécanique pour décrire le - Temporelle à partir de la réponse indicielle et/ou
comportement du système, est donné en fonction du fréquentielle à partir par exemple des
temps. diagrammes de BODE
Equations Non
linéaires
Oui
Linéarisation autour d'un point de
fonctionnement précisé
Transformation des équations vers le domaine de LAPLACE
Compléter ou établir un schéma bloc fonctionnel
schéma sans perturbation schéma avec perturbation P(p)
Après réduction du schéma blocs pour le mettre sous Utiliser le principe de superposition et les règles
sa forme canonique on peut déduire: de réduction des schémas blocs pour trouver
FTBO ; FTBF et La fonction de l'écart l'expression de la sortie
Analyse des performances du système (Stabilité, précision, rapidité,
amortissement...). Dans ce cas on peut utiliser les acquis de l'analyse
temporelle, fréquentielle …..
Respect du cahier
Non
des charges
Oui
Réglage et correction pour satisfaire le
cahier des charges
Fin de l'étude
Propriétés de la transformée de Laplace
1) Unicité
À une correspond une unique, et inversement.
2) Linéarité
3) Théorème du retard
4) Théorème de dérivation
5) Théorème d'intégration
6) Théorème de la valeur initiale
7) Théorème de la valeur finale
Rappel : la réponse indicielle est la
réponse à l’échelon ; on prendra ici un
échelon unitaire
s(t ) = K (1 − e−t /τ ) pour t ≥ 0
NB : si l’échelon est d’amplitude A, la réponse est multipliée par A s (t ) = AK (1 − e − t /τ ) pour t ≥ 0
EXEMPLE : SYSTEMES DU 1er ordre
Calcul et tracé de réponse
S ( p) 20
H ( p) = =
E ( p) 5 + p
1. Sachant ici que e(t) est l’echelon d’amplitude 5, combien vaut :
E ( p) = s (t ) =
2. Tracer la réponse s(t) à l’échelon d’amplitude 5 - Allure et points caractéristiques (valeur finale, T5%,
tangente en 0, temps caractéristique…) – Vous respecterez scrupuleusement votre choix d’échelle.
Identification :
s (t )
e (t )
1. A l’aide d’une identification graphique , combien vaut :
E ( p) = H ( p) =
s (t ) =
−πξ
1−ξ 2 D1
D1% = e
=
K
NB : si l’échelon est d’amplitude A, la réponse est multipliée par A
ξ≤1 ξ≥1
1er Dépassement
EXEMPLE : SYSTEMES DU 2d ordre
Calcul et tracé de réponse
3
S ( p) 2
H ( p) = =
E ( p) 1 + p + p 2
1. Donner ξ et ω0 . En déduire D1 (pour l’échelon d’amplitude 2 ) et T.
Pulsation propre ω0 =
Coefficient d’amortissement : ξ=
E ( p) =
D1 =
D1 %=
T=
2. Tracer la réponse s(t) à l’échelon d’amplitude 2 - Allure et points caractéristiques (valeur finale, T5%,
tangente en 0, temps caractéristique…) – Vous respecterez scrupuleusement votre choix d’échelle.
Identification
1. A l’aide d’une identification graphique , combien vaut :
E ( p) =
D1 =
Coefficient d’amortissement : ξ=
T=
Pulsation propre ω0 =
H ( p) =
Invariants et rappels sur les réponses temporelles
Le système à étudier (connu)
=
Un ensemble des éléments
Associer un modèle de Associer un modèle de
connaissance au système comportement : Identification du
système ou de certains éléments
Un ensemble d'équations déduites des lois de la Identification :
physique, de la mécanique pour décrire le - Temporelle à partir de la réponse indicielle et/ou
comportement du système, est donné en fonction du fréquentielle à partir par exemple des
temps. diagrammes de BODE
Equations Non
linéaires
Oui
Linéarisation autour d'un point de
fonctionnement précisé
Transformation des équations vers le domaine de LAPLACE
Compléter ou établir un schéma bloc fonctionnel
schéma sans perturbation schéma avec perturbation P(p)
Après réduction du schéma blocs pour le mettre sous Utiliser le principe de superposition et les règles
sa forme canonique on peut déduire: de réduction des schémas blocs pour trouver
FTBO ; FTBF et La fonction de l'écart l'expression de la sortie
Analyse des performances du système (Stabilité, précision, rapidité,
amortissement...). Dans ce cas on peut utiliser les acquis de l'analyse
temporelle, fréquentielle …..
Respect du cahier
Non
des charges
Oui
Réglage et correction pour satisfaire le
cahier des charges
Fin de l'étude
Propriétés de la transformée de Laplace
1) Unicité
À une correspond une unique, et inversement.
2) Linéarité
3) Théorème du retard
4) Théorème de dérivation
5) Théorème d'intégration
6) Théorème de la valeur initiale
7) Théorème de la valeur finale
Rappel : la réponse indicielle est la
réponse à l’échelon ; on prendra ici un
échelon unitaire
s(t ) = K (1 − e−t /τ ) pour t ≥ 0
NB : si l’échelon est d’amplitude A, la réponse est multipliée par A s (t ) = AK (1 − e − t /τ ) pour t ≥ 0
EXEMPLE : SYSTEMES DU 1er ordre
Calcul et tracé de réponse
S ( p) 20
H ( p) = =
E ( p) 5 + p
1. Sachant ici que e(t) est l’echelon d’amplitude 5, combien vaut :
E ( p) = s (t ) =
2. Tracer la réponse s(t) à l’échelon d’amplitude 5 - Allure et points caractéristiques (valeur finale, T5%,
tangente en 0, temps caractéristique…) – Vous respecterez scrupuleusement votre choix d’échelle.
Identification :
s (t )
e (t )
1. A l’aide d’une identification graphique , combien vaut :
E ( p) = H ( p) =
s (t ) =
−πξ
1−ξ 2 D1
D1% = e
=
K
NB : si l’échelon est d’amplitude A, la réponse est multipliée par A
ξ≤1 ξ≥1
1er Dépassement
EXEMPLE : SYSTEMES DU 2d ordre
Calcul et tracé de réponse
3
S ( p) 2
H ( p) = =
E ( p) 1 + p + p 2
1. Donner ξ et ω0 . En déduire D1 (pour l’échelon d’amplitude 2 ) et T.
Pulsation propre ω0 =
Coefficient d’amortissement : ξ=
E ( p) =
D1 =
D1 %=
T=
2. Tracer la réponse s(t) à l’échelon d’amplitude 2 - Allure et points caractéristiques (valeur finale, T5%,
tangente en 0, temps caractéristique…) – Vous respecterez scrupuleusement votre choix d’échelle.
Identification
1. A l’aide d’une identification graphique , combien vaut :
E ( p) =
D1 =
Coefficient d’amortissement : ξ=
T=
Pulsation propre ω0 =
H ( p) =


, reçois gratuitement 1 exemplaire de test de la TI-82 Advanced Edition Python. À demander d'ici le 31 décembre 2024.")





