
Cours dynamique
DownloadTélécharger
Actions
Vote :
ScreenshotAperçu
Informations
Catégorie :Category: mViewer GX Creator Lua TI-Nspire
Auteur Author: mcboulba
Type : Classeur 3.6
Page(s) : 20
Taille Size: 1.45 Mo MB
Mis en ligne Uploaded: 29/01/2021 - 18:15:30
Uploadeur Uploader: mcboulba (Profil)
Téléchargements Downloads: 23
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a2694652
Type : Classeur 3.6
Page(s) : 20
Taille Size: 1.45 Mo MB
Mis en ligne Uploaded: 29/01/2021 - 18:15:30
Uploadeur Uploader: mcboulba (Profil)
Téléchargements Downloads: 23
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a2694652
Description
THEME3 : Modéliser et vérifier les performances dynamiques des systèmes Lycée Jean Perrin PSI*
I. PRINCIPE FONDAMENTAL DE LA DYNAMIQUE
Principe = théorie vérifiée par l’expérience, donc valable dans un domaine d’étude précis.
1. PROBLEMATIQUE
Cinématique : étude du mouvement d’un ou plusieurs solides sans se poser la question : qu’est-ce qui crée, modifie
ou entretient ce mouvement ?
des actions mécaniques dans les liaisons, moteurs ou résistants…
Dynamique : déterminer les relations entre les paramètres cinématiques du mouvement et les efforts
extérieurs appliqués au système étudié.
Hypothèse : On étudie un ou plusieurs solides indéformables, on parle de système de solides, à masse conservative.
Exemple : Régulateur centrifuge de la direction assistée d’une Xantia.
Considérons le régulateur centrifuge utilisé dans la direction assistée « DIRAVI »
de Citroën. Ce système dont la fréquence de rotation est liée à la vitesse du
véhicule, agit sur un circuit hydraulique et permet de faire varier l’assistance en
fonction de la vitesse.
L’axe 1 est entraîné en rotation à une vitesse proportionnelle à celle du véhicule,
les masselottes 2 et 2’ montées sur cet axe s’écartent de leur axe sous l’effet de
l’accélération centripète. En s’écartant, elles translatent la coulisseau 3 et
inclinent le levier 3 par l’intermédiaire du ressort (voir annexe 1).
L’inclinaison du levier 3 entraîne la translation de l’axe 5 et donc l’ouverture plus
ou moins grande de l’orifice de haute pression de l’huile circulant dans la
direction assistée.
Ce régulateur permet alors d’adapter l’assistance au volant en fonction de la vitesse du véhicule.
Nous chercherons à déterminer l’inclinaison des masselottes en fonction des masses et des efforts extérieurs.
2. TORSEUR DYNAMIQUE
Torseur dynamique = quantités d’accélérations de tous les points du système de solides Σ.
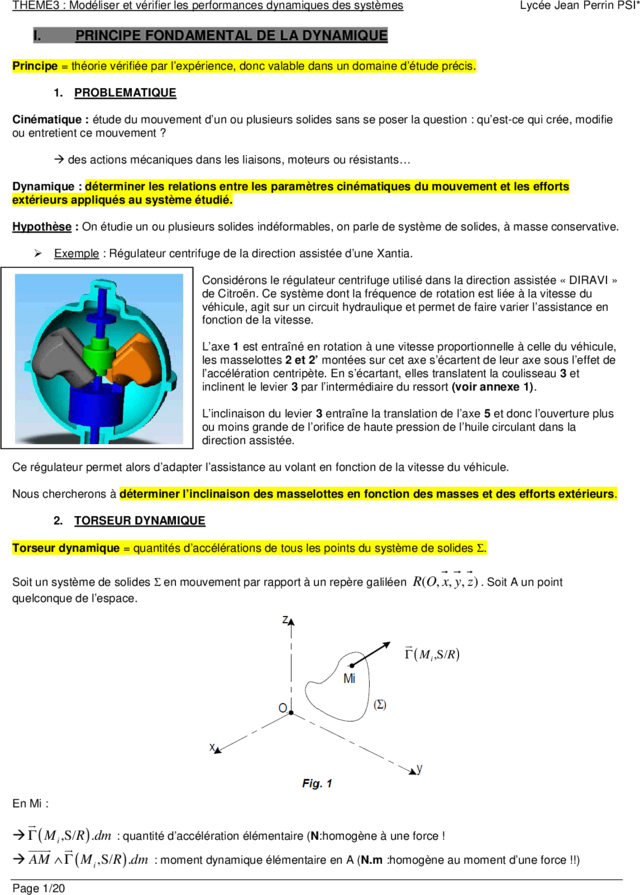
Soit un système de solides Σ en mouvement par rapport à un repère galiléen R(O, x, y, z ) . Soit A un point
quelconque de l’espace.
Γ ( M i ,S/R )
En Mi :
Γ ( M i ,S/R ) .dm : quantité d’accélération élémentaire (N:homogène à une force !
AM ∧ Γ ( M i ,S/R ) .dm : moment dynamique élémentaire en A (N.m :homogène au moment d’une force !!)
Page 1/20
THEME3 : Modéliser et vérifier les performances dynamiques des systèmes Lycée Jean Perrin PSI*
Il suffit de sommer sur le système Σ pour avoir le torseur dynamique de Σ en A par rapport au repère R(O, x, y, z ) :
Rd ( Σ/R ) = Γ ( M,Σ/R ) .dm
∫Σ
{D ( Σ/R )} =
δ ( A, Σ/R ) = ∫ AM ∧ Γ ( M,Σ/R ) .dm
A
Σ A
Résultante dynamique :
La quantité Rd ( Σ/R ) est la résultante dynamique du système Σ dans son mouvement par rapport au repère
R(O, x, y, z ) . Unités : N.
La résultante dynamique dépend uniquement des paramètres de position des solides de Σ dans l’espace et de
leurs dérivées premières et secondes. Cette forme n’est pas utilisée pour le calcul. On verra dans le paragraphe II
comment calculer cette résultante.
Moment dynamique :
La quantité δ ( A, Σ/R ) est appelée moment dynamique en A du système Σ dans son mouvement par rapport au
repère R(O, x, y, z ) . Unités : N.m
De même, le moment dynamique ne dépend que des paramètres de position des solides.
Il s’agit d’un moment d’un torseur, donc il est calculable en tout point de l’espace à l’aide de la formule classique d’un
champ de moments d’un torseur :
Changement de point : δ ( B, Σ/R ) = δ ( A, Σ/R ) + BA ∧ Rd ( Σ/R )
3. PRINCIPE FONDAMENTAL DE LA DYNAMIQUE : PFD
Enoncé : Il existe au moins un repère galiléen R tel que pour tout système matériel Σ, le torseur dynamique dans ce
repère R en un point A de l’espace est égal à chaque instant à la somme des torseurs en A des efforts extérieurs
appliqués à Σ.
{D ( Σ/R )} A {(
=Σ T Σ→Σ )} A
repère galiléen= pour nos études, tout repère lié à la terre sera considéré comme Galiléen.
1. Théorème de la résultante dynamique TRD
Pour le système Σ en mouvement dans R(O, x, y, z ) galiléen, la résultante dynamique est égale à la résultante des
efforts extérieures appliquées sur Σ :
Rd ( Σ/R ) = ∑ R Σ → Σ( )
La projection de cette équation vectorielle dans une BOND nous donne 3 équations scalaires, 3 équations
différentielles du mouvement liant les efforts extérieurs aux paramètres cinématiques.
il y aura dans ces équations uniquement des forces ! pas de couple moteur, moment de freinage etc…
2. Théorème du moment dynamique TMD
Pour le système Σ en mouvement dans R(O, x, y, z ) galiléen, le moment dynamique en A est égal à la somme des
moments en A des efforts extérieures appliquées sur Σ :
(
δ ( A, Σ/R ) = ∑ M A, Σ → Σ )
Page 2/20
THEME3 : Modéliser et vérifier les performances dynamiques des systèmes Lycée Jean Perrin PSI*
La projection de cette équation vectorielle dans une BOND nous donne 3 équations scalaires, 3 équations
différentielles du mouvement liant les efforts extérieurs aux paramètres cinématiques.
il y aura dans ces équations les moments des forces présentes dans le TRD plus les couples moteurs,
couples résistants etc...
4. APPLICATION DU PRINCIPE FONDAMENTAL
Rarement, dans les problèmes proposés, nous aurons à écrire les 6 équations du PFD pour résoudre le problème
posé. Parfois quelques équations équations suffisent, il faut déterminer quel théorème appliquer et sur quel axe de
projection.
Exemple 1 : Transformation de mouvement (loi entrée sortie Dynamique)
Le maneton 6 est lié au bâti par une liaison pivot d’axe B( z0 ) et est entraîné par un couple moteur Cm z0 . La croix de
Malte 5 est liée au bâti par une liaison pivot d’axe C ( z0 ) .
Un couple résistant s’exerce sur 5 autour de l’axe C ( z0 ) : Cr z0 .
La liaison entre 6 et 5 au niveau du galet peut être assimilée à une liaison ponctuelle de normale ( A, v ) :
F5→6 = A.v F0→5
{T5→6 }A = {T0→5 }C = avec M ( C , 0/5) ).z 0 = 0
0 A M ( C , 0/5) ) C
F0→6
{T0→6 }B = avec M ( B, 0/6) ).z 0 = 0
M ( B, 0/6) ) B
Les actions de pesanteur sont négligées et la croix de Malte 5 tourne librement autour de son axe. On souhaite
exprimer Cm en fonction de Cr lorsque le mouvement est connu.
Quel(s) système(s) à isoler, quel théorème utiliser et sur quel axe de projection ?
2 inconnues donc 2 équations !!
• On isole 6, pour faire apparaître Cm, il faut une équation de moment dynamique en B en projection sur z0 , elle
fera apparaître le moment en B de F5→6 : (
δ ( B, 6/0 ).z0 = Cm + BA ∧ A.v .z0 )
• On isole 5, pour connaître A sans faire intervenir les actions de la pivot en C, il faut écrire l’équation de moment
dynamique en C sur z0 : (
δ ( C ,5/0 ).z0 = Cr + CA ∧ − A.v .z0 )
En faisant disparaitre A, on peut mettre en place une relation « entrée sortie » dynamique entre Cm et Cr.
Page 3/20
THEME3 : Modéliser et vérifier les performances dynamiques des systèmes Lycée Jean Perrin PSI*
Exemple 2 : Banc d’essai de suspension de moto (vu en TP)
La liaison entre le châssis 5 et le bâti 1 est une liaison glissière d’axe (O, y ) . La liaison entre la traverse 9 et la roue 6
F9→6 = F . y
est une liaison ponctuelle, les actions de 9 sur 6 peuvent être modélisées par {T9→6 }I = en négligeant
...
I. PRINCIPE FONDAMENTAL DE LA DYNAMIQUE
Principe = théorie vérifiée par l’expérience, donc valable dans un domaine d’étude précis.
1. PROBLEMATIQUE
Cinématique : étude du mouvement d’un ou plusieurs solides sans se poser la question : qu’est-ce qui crée, modifie
ou entretient ce mouvement ?
des actions mécaniques dans les liaisons, moteurs ou résistants…
Dynamique : déterminer les relations entre les paramètres cinématiques du mouvement et les efforts
extérieurs appliqués au système étudié.
Hypothèse : On étudie un ou plusieurs solides indéformables, on parle de système de solides, à masse conservative.
Exemple : Régulateur centrifuge de la direction assistée d’une Xantia.
Considérons le régulateur centrifuge utilisé dans la direction assistée « DIRAVI »
de Citroën. Ce système dont la fréquence de rotation est liée à la vitesse du
véhicule, agit sur un circuit hydraulique et permet de faire varier l’assistance en
fonction de la vitesse.
L’axe 1 est entraîné en rotation à une vitesse proportionnelle à celle du véhicule,
les masselottes 2 et 2’ montées sur cet axe s’écartent de leur axe sous l’effet de
l’accélération centripète. En s’écartant, elles translatent la coulisseau 3 et
inclinent le levier 3 par l’intermédiaire du ressort (voir annexe 1).
L’inclinaison du levier 3 entraîne la translation de l’axe 5 et donc l’ouverture plus
ou moins grande de l’orifice de haute pression de l’huile circulant dans la
direction assistée.
Ce régulateur permet alors d’adapter l’assistance au volant en fonction de la vitesse du véhicule.
Nous chercherons à déterminer l’inclinaison des masselottes en fonction des masses et des efforts extérieurs.
2. TORSEUR DYNAMIQUE
Torseur dynamique = quantités d’accélérations de tous les points du système de solides Σ.
Soit un système de solides Σ en mouvement par rapport à un repère galiléen R(O, x, y, z ) . Soit A un point
quelconque de l’espace.
Γ ( M i ,S/R )
En Mi :
Γ ( M i ,S/R ) .dm : quantité d’accélération élémentaire (N:homogène à une force !
AM ∧ Γ ( M i ,S/R ) .dm : moment dynamique élémentaire en A (N.m :homogène au moment d’une force !!)
Page 1/20
THEME3 : Modéliser et vérifier les performances dynamiques des systèmes Lycée Jean Perrin PSI*
Il suffit de sommer sur le système Σ pour avoir le torseur dynamique de Σ en A par rapport au repère R(O, x, y, z ) :
Rd ( Σ/R ) = Γ ( M,Σ/R ) .dm
∫Σ
{D ( Σ/R )} =
δ ( A, Σ/R ) = ∫ AM ∧ Γ ( M,Σ/R ) .dm
A
Σ A
Résultante dynamique :
La quantité Rd ( Σ/R ) est la résultante dynamique du système Σ dans son mouvement par rapport au repère
R(O, x, y, z ) . Unités : N.
La résultante dynamique dépend uniquement des paramètres de position des solides de Σ dans l’espace et de
leurs dérivées premières et secondes. Cette forme n’est pas utilisée pour le calcul. On verra dans le paragraphe II
comment calculer cette résultante.
Moment dynamique :
La quantité δ ( A, Σ/R ) est appelée moment dynamique en A du système Σ dans son mouvement par rapport au
repère R(O, x, y, z ) . Unités : N.m
De même, le moment dynamique ne dépend que des paramètres de position des solides.
Il s’agit d’un moment d’un torseur, donc il est calculable en tout point de l’espace à l’aide de la formule classique d’un
champ de moments d’un torseur :
Changement de point : δ ( B, Σ/R ) = δ ( A, Σ/R ) + BA ∧ Rd ( Σ/R )
3. PRINCIPE FONDAMENTAL DE LA DYNAMIQUE : PFD
Enoncé : Il existe au moins un repère galiléen R tel que pour tout système matériel Σ, le torseur dynamique dans ce
repère R en un point A de l’espace est égal à chaque instant à la somme des torseurs en A des efforts extérieurs
appliqués à Σ.
{D ( Σ/R )} A {(
=Σ T Σ→Σ )} A
repère galiléen= pour nos études, tout repère lié à la terre sera considéré comme Galiléen.
1. Théorème de la résultante dynamique TRD
Pour le système Σ en mouvement dans R(O, x, y, z ) galiléen, la résultante dynamique est égale à la résultante des
efforts extérieures appliquées sur Σ :
Rd ( Σ/R ) = ∑ R Σ → Σ( )
La projection de cette équation vectorielle dans une BOND nous donne 3 équations scalaires, 3 équations
différentielles du mouvement liant les efforts extérieurs aux paramètres cinématiques.
il y aura dans ces équations uniquement des forces ! pas de couple moteur, moment de freinage etc…
2. Théorème du moment dynamique TMD
Pour le système Σ en mouvement dans R(O, x, y, z ) galiléen, le moment dynamique en A est égal à la somme des
moments en A des efforts extérieures appliquées sur Σ :
(
δ ( A, Σ/R ) = ∑ M A, Σ → Σ )
Page 2/20
THEME3 : Modéliser et vérifier les performances dynamiques des systèmes Lycée Jean Perrin PSI*
La projection de cette équation vectorielle dans une BOND nous donne 3 équations scalaires, 3 équations
différentielles du mouvement liant les efforts extérieurs aux paramètres cinématiques.
il y aura dans ces équations les moments des forces présentes dans le TRD plus les couples moteurs,
couples résistants etc...
4. APPLICATION DU PRINCIPE FONDAMENTAL
Rarement, dans les problèmes proposés, nous aurons à écrire les 6 équations du PFD pour résoudre le problème
posé. Parfois quelques équations équations suffisent, il faut déterminer quel théorème appliquer et sur quel axe de
projection.
Exemple 1 : Transformation de mouvement (loi entrée sortie Dynamique)
Le maneton 6 est lié au bâti par une liaison pivot d’axe B( z0 ) et est entraîné par un couple moteur Cm z0 . La croix de
Malte 5 est liée au bâti par une liaison pivot d’axe C ( z0 ) .
Un couple résistant s’exerce sur 5 autour de l’axe C ( z0 ) : Cr z0 .
La liaison entre 6 et 5 au niveau du galet peut être assimilée à une liaison ponctuelle de normale ( A, v ) :
F5→6 = A.v F0→5
{T5→6 }A = {T0→5 }C = avec M ( C , 0/5) ).z 0 = 0
0 A M ( C , 0/5) ) C
F0→6
{T0→6 }B = avec M ( B, 0/6) ).z 0 = 0
M ( B, 0/6) ) B
Les actions de pesanteur sont négligées et la croix de Malte 5 tourne librement autour de son axe. On souhaite
exprimer Cm en fonction de Cr lorsque le mouvement est connu.
Quel(s) système(s) à isoler, quel théorème utiliser et sur quel axe de projection ?
2 inconnues donc 2 équations !!
• On isole 6, pour faire apparaître Cm, il faut une équation de moment dynamique en B en projection sur z0 , elle
fera apparaître le moment en B de F5→6 : (
δ ( B, 6/0 ).z0 = Cm + BA ∧ A.v .z0 )
• On isole 5, pour connaître A sans faire intervenir les actions de la pivot en C, il faut écrire l’équation de moment
dynamique en C sur z0 : (
δ ( C ,5/0 ).z0 = Cr + CA ∧ − A.v .z0 )
En faisant disparaitre A, on peut mettre en place une relation « entrée sortie » dynamique entre Cm et Cr.
Page 3/20
THEME3 : Modéliser et vérifier les performances dynamiques des systèmes Lycée Jean Perrin PSI*
Exemple 2 : Banc d’essai de suspension de moto (vu en TP)
La liaison entre le châssis 5 et le bâti 1 est une liaison glissière d’axe (O, y ) . La liaison entre la traverse 9 et la roue 6
F9→6 = F . y
est une liaison ponctuelle, les actions de 9 sur 6 peuvent être modélisées par {T9→6 }I = en négligeant
...


, reçois gratuitement 1 exemplaire de test de la TI-82 Advanced Edition Python. À demander d'ici le 31 décembre 2024.")





