
Fiche formules
DownloadTélécharger
Actions
Vote :
ScreenshotAperçu
Informations
Catégorie :Category: mViewer GX Creator Lua TI-Nspire
Auteur Author: mcboulba
Type : Classeur 3.6
Page(s) : 2
Taille Size: 142.19 Ko KB
Mis en ligne Uploaded: 29/01/2021 - 18:10:59
Uploadeur Uploader: mcboulba (Profil)
Téléchargements Downloads: 28
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a2694650
Type : Classeur 3.6
Page(s) : 2
Taille Size: 142.19 Ko KB
Mis en ligne Uploaded: 29/01/2021 - 18:10:59
Uploadeur Uploader: mcboulba (Profil)
Téléchargements Downloads: 28
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a2694650
Description
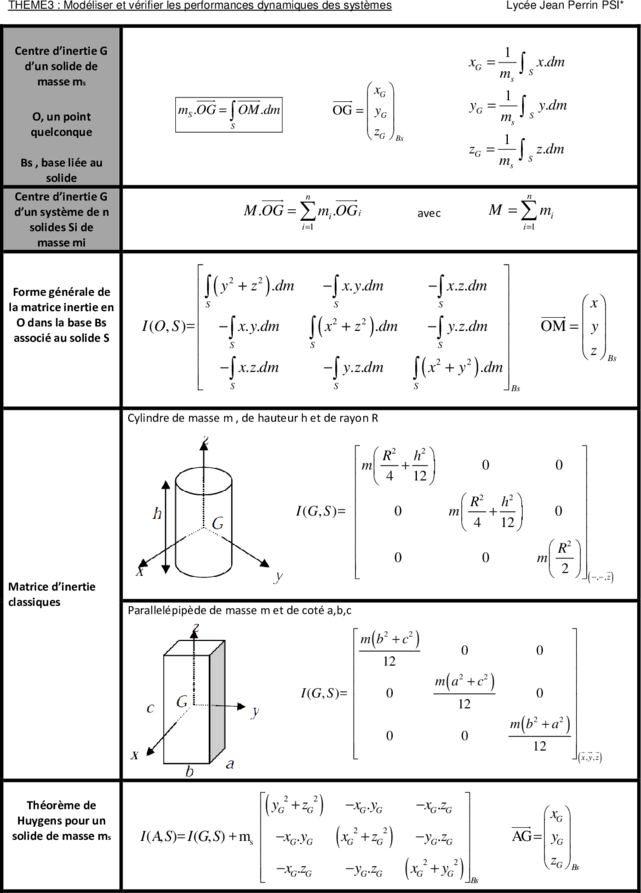
THEME3 : Modéliser et vérifier les performances dynamiques des systèmes Lycée Jean Perrin PSI*
Centre d’inertie G 1
d’un solide de xG =
ms ∫ S
x.dm
masse ms
xG 1
O, un point
mS .OG = ∫ OM .dm OG = yG yG =
ms ∫ S
y.dm
S z
quelconque G Bs 1
Bs , base liée au
zG =
ms ∫ S
z.dm
solide
Centre d’inertie G n n
d’un système de n M .OG = ∑ mi .OG i avec M = ∑ mi
solides Si de i =1 i =1
masse mi
∫ ( y + z ) .dm − ∫ x. y.dm − ∫ x.z.dm
2 2
Forme générale de
la matrice inertie en S S S x
∫S ( x + z ) .dm −∫S y.z.dm
O dans la base Bs I (O, S )= − ∫ x. y.dm 2 2 OM = y
associé au solide S
S
z
Bs
− x.z.dm
∫S − ∫ y.z.dm ∫ ( x + y ).dm
2 2
S S Bs
Cylindre de masse m , de hauteur h et de rayon R
R 2 h2
m + 0 0
4 12
R 2
h
2
I (G , S )= 0 m + 0
4 12
R2
0 0 m
2 ( − , − , z )
Matrice d’inertie
classiques
Parallelépipède de masse m et de coté a,b,c
m ( b2 + c2 )
0 0
12
m ( a 2 + c2 )
I (G, S )= 0 0
12
m ( b2 + a2 )
0 0
12 ( x , y , z )
Théorème de
Huygens pour un
(
yG2 + zG2
) −xG .yG −xG .zG
xG
solide de masse ms I ( A, S)= I (G, S) + ms −xG .yG
(xG
2
+ zG
2
) −yG .zG
AG = yG
z
−xG .zG −yG.zG ( xG + yG
2
)
2
Bs
G Bs
Rc ( S/R ) = V ( M,S/R ) .dm
∫
Torseur cinétique {C ( S/R )}A = S
σ ( A, S/R ) = ∫ S AM ∧ V ( M,S/R ) .dm
A
Rc ( S/R ) = ms .V ( G , S/R )
Résultante
cinétique
Moment cinétique σ ( A, S/R ) = I ( A, S ).Ω ( S/R ) + ms . AG ∧ V ( A, S/R )...
Centre d’inertie G 1
d’un solide de xG =
ms ∫ S
x.dm
masse ms
xG 1
O, un point
mS .OG = ∫ OM .dm OG = yG yG =
ms ∫ S
y.dm
S z
quelconque G Bs 1
Bs , base liée au
zG =
ms ∫ S
z.dm
solide
Centre d’inertie G n n
d’un système de n M .OG = ∑ mi .OG i avec M = ∑ mi
solides Si de i =1 i =1
masse mi
∫ ( y + z ) .dm − ∫ x. y.dm − ∫ x.z.dm
2 2
Forme générale de
la matrice inertie en S S S x
∫S ( x + z ) .dm −∫S y.z.dm
O dans la base Bs I (O, S )= − ∫ x. y.dm 2 2 OM = y
associé au solide S
S
z
Bs
− x.z.dm
∫S − ∫ y.z.dm ∫ ( x + y ).dm
2 2
S S Bs
Cylindre de masse m , de hauteur h et de rayon R
R 2 h2
m + 0 0
4 12
R 2
h
2
I (G , S )= 0 m + 0
4 12
R2
0 0 m
2 ( − , − , z )
Matrice d’inertie
classiques
Parallelépipède de masse m et de coté a,b,c
m ( b2 + c2 )
0 0
12
m ( a 2 + c2 )
I (G, S )= 0 0
12
m ( b2 + a2 )
0 0
12 ( x , y , z )
Théorème de
Huygens pour un
(
yG2 + zG2
) −xG .yG −xG .zG
xG
solide de masse ms I ( A, S)= I (G, S) + ms −xG .yG
(xG
2
+ zG
2
) −yG .zG
AG = yG
z
−xG .zG −yG.zG ( xG + yG
2
)
2
Bs
G Bs
Rc ( S/R ) = V ( M,S/R ) .dm
∫
Torseur cinétique {C ( S/R )}A = S
σ ( A, S/R ) = ∫ S AM ∧ V ( M,S/R ) .dm
A
Rc ( S/R ) = ms .V ( G , S/R )
Résultante
cinétique
Moment cinétique σ ( A, S/R ) = I ( A, S ).Ω ( S/R ) + ms . AG ∧ V ( A, S/R )...


, reçois gratuitement 1 exemplaire de test de la TI-82 Advanced Edition Python. À demander d'ici le 31 décembre 2024.")





