
changements de référentiels
DownloadTélécharger
Actions
Vote :
ScreenshotAperçu
Informations
Catégorie :Category: mViewer GX Creator Lua TI-Nspire
Auteur Author: omar1998
Type : Classeur 3.6
Page(s) : 14
Taille Size: 1.17 Mo MB
Mis en ligne Uploaded: 10/03/2019 - 11:55:51
Uploadeur Uploader: omar1998 (Profil)
Téléchargements Downloads: 31
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a1968378
Type : Classeur 3.6
Page(s) : 14
Taille Size: 1.17 Mo MB
Mis en ligne Uploaded: 10/03/2019 - 11:55:51
Uploadeur Uploader: omar1998 (Profil)
Téléchargements Downloads: 31
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a1968378
Description
Sciences Physiques - Chimie MP
Partie A : Mécanique – Ch.1 : Changements de référentiels
Ch.1 Changements de référentiels
Lois de la mécanique en référentiels non galiléens
En 1ère année nous avons pu voir les mvts des systèmes dans des référentiels galiléens. Les
différentes loi à maîtriser sont ainsi : la 2 éme loi de Newton, le théorème de l'énergie cinétique, de
l'énergie mécanique et du moment cinétique.
Nous allons généraliser ces théorèmes aux cas des référentiels non galiléens.
I. Mvt d'un référentiel par rapport à un autre
I.1. Rappels sur la notion de référentiel
Pour décrire le mouvement d'un objet vu par observateur, il faut définir un repère
(O , ⃗
ux , ⃗
uy ,⃗
u z ) et une horloge pour savoir à un instant précis où est situé cet objet pour
l'observateur. Ce couple repère+horloge est la définition d'un référentiel. Ce référentiel est lié à un
solide fixe.
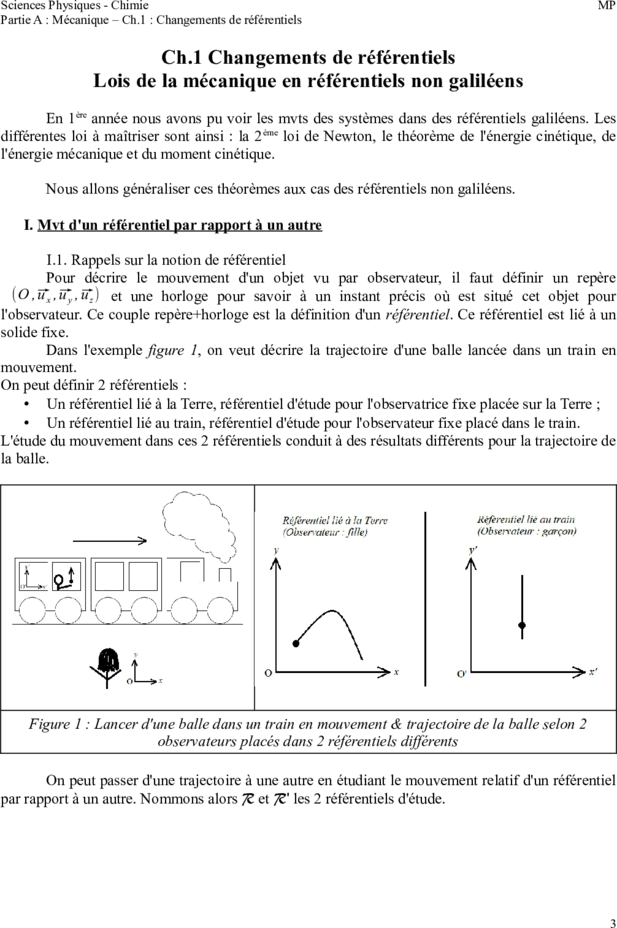
Dans l'exemple figure 1, on veut décrire la trajectoire d'une balle lancée dans un train en
mouvement.
On peut définir 2 référentiels :
• Un référentiel lié à la Terre, référentiel d'étude pour l'observatrice fixe placée sur la Terre ;
• Un référentiel lié au train, référentiel d'étude pour l'observateur fixe placé dans le train.
L'étude du mouvement dans ces 2 référentiels conduit à des résultats différents pour la trajectoire de
la balle.
Figure 1 : Lancer d'une balle dans un train en mouvement & trajectoire de la balle selon 2
observateurs placés dans 2 référentiels différents
On peut passer d'une trajectoire à une autre en étudiant le mouvement relatif d'un référentiel
par rapport à un autre. Nommons alors R et R' les 2 référentiels d'étude.
3
Sciences Physiques - Chimie MP
Partie A : Mécanique – Ch.1 : Changements de référentiels
I.2. Mouvement relatif de 2 référentiels
On suppose que les axes des 2 référentiels sont parallèles entre eux à un instant donné. On
étudie alors les 2 cas présentés sur la figure 2 : mouvement de translation et mouvements de rotation
autour d'un axe fixe.
Figure 2 : Mouvement relatif de 2 référentiels
a. Mouvement de translation
Un référentiel R' est en translation par rapport à un référentiel R si leurs axes restent
constamment parallèles. On peut alors définir une vitesse de translation : v⃗ (R ' / R) .
Si le vecteur vitesse est de direction constante, on parle de translation rectiligne.
Si le vecteur vitesse est de norme constante, on parle de translation uniforme.
Pour savoir si on a une translation d'un référentiel par rapport à un autre, il suffit de prendre
un vecteur ⃗ AB sur le solide de référence et de regarder si ce vecteur reste toujours parallèle à lui-
même au cours du temps.
Exemples :
• Dans le cas du train précédent, que peut-on dire du référentiel lié au train par rapport
au ref terrestre ?
• Le ref géocentrique est il en translation par rapport au ref de Copernic ?
• Le ref terrestre est il en translation par rapport au ref géocentrique ?
b. Mouvement de rotation (uniforme) autour d'un axe fixe
La plupart du temps on prendra un référentiel R' tournant autour d'un axe fixe Oz par
rapport au référentiel R.
Le vecteur rotation se note : ⃗ u z =θ˙ ⃗
ω ( R ' / R)=ω .⃗ uz
Dans la suite on n'étudie que les mvts de rotation uniforme, càd à w constant.
Exemples :
• Que peut-on dire du ref terrestre par rapport au ref géocentrique ? Calculer sa vitesse
de rotation. Donner un autre exemple de ref en mvt de rotation autour d'un axe fixe
par rapport à un autre ref.
4
Sciences Physiques - Chimie MP
Partie A : Mécanique – Ch.1 : Changements de référentiels
Nous allons créer les 4 prochaines parties en commun. Toutes les formules sont à connaître
et à savoir redémontrer rapidement. Le mieux pour les apprendre est de les trouver par vous même.
II. Dérivées d'un vecteur selon le référentiel
La vitesse est la dérivée de la position. Typiquement la vitesse de la balle dans le train n'est
pas la même si on se place dans le référentiel terrestre ou dans le référentiel du train.
On va donc faire apparaître le référentiel lors de la dérivation.
d⃗A
Soit un vecteur ⃗ A quelconque. Notons ) sa dérivée dans le référentiel R.
dt R
• On décompose ⃗ A dans le référentiel R', décrit par le repère (O ' , ⃗ u x ' ,⃗
u y ' ,⃗
uz ' ) :
⃗ ⃗ ⃗ ⃗
A=a (t) . u x ' +b(t). u y ' +c(t ). u z '
d⃗
A
Les vecteurs ⃗
ux ' ,⃗
u y ' ,⃗
u z ' ne varient pas dans R', donc ) =a˙ (t). ⃗ ˙
u x ' +b(t). ⃗
u y ' + c˙ (t). ⃗
uz'
dt R '
En revanche, puisque R' est en mvt par rapport à R, les vecteurs ⃗ ux ' ,⃗
u y ' ,⃗
u z ' varient dans R et
⃗ ⃗
d ux ' ⃗
d uy' d⃗uz '
on a : d A ) R=a˙ (t). ⃗ ˙ t). ⃗
u x ' +b( u y ' +c˙ (t) .⃗
u z ' +a (t ). ) R+b (t ). ) R+c (t). )
dt dt dt dt R
Cas 1 : R' est en translation par rapport à R.
Les vecteurs ⃗ ux ' ,⃗
u y ' ,⃗
u z ' ne changent ni de normes, ni de directions, ni de sens donc
d⃗
ux ' d⃗
uy ' d⃗ uz ' d⃗
A d⃗
A
) R= )R = ) R =⃗0 et ) R= )R '
dt dt dt dt dt
Cas 2 : R' est en rotation uniforme autour d'un axe fixe par rapport à R (figure 3).
On prend (Oz) cet axe fixe, et le vecteur rotation est alors : ⃗ ω ( R ' / R)=ω .⃗ u z =θ˙ ⃗
uz
⃗
d uz '
On a : ⃗u z '=⃗
u z et ) =⃗0
dt R
• On décompose ⃗ u x ' et ⃗ u x et ⃗
u y ' sur les vecteurs ⃗ u y suivant la figure 3.
⃗
u x '=cos (θ)⃗ u x +sin (θ)⃗ uy
On a : ⃗
u y '=−sin( θ)⃗ u x +cos (θ)⃗ uy
d⃗ ux '
) =−θ˙ sin (θ)⃗ ˙
u x +θcos (θ)⃗ uy
dt R
Donc :
d⃗ uy'
) =−θ˙ cos (θ) ⃗ ˙
u x−θsin (θ) ⃗ uy
dt R
d⃗
ux '
) =−θ˙ sin (θ)⃗ uy ^ ⃗ u z +θ˙ cos (θ)⃗ uz ^ ⃗
...
Partie A : Mécanique – Ch.1 : Changements de référentiels
Ch.1 Changements de référentiels
Lois de la mécanique en référentiels non galiléens
En 1ère année nous avons pu voir les mvts des systèmes dans des référentiels galiléens. Les
différentes loi à maîtriser sont ainsi : la 2 éme loi de Newton, le théorème de l'énergie cinétique, de
l'énergie mécanique et du moment cinétique.
Nous allons généraliser ces théorèmes aux cas des référentiels non galiléens.
I. Mvt d'un référentiel par rapport à un autre
I.1. Rappels sur la notion de référentiel
Pour décrire le mouvement d'un objet vu par observateur, il faut définir un repère
(O , ⃗
ux , ⃗
uy ,⃗
u z ) et une horloge pour savoir à un instant précis où est situé cet objet pour
l'observateur. Ce couple repère+horloge est la définition d'un référentiel. Ce référentiel est lié à un
solide fixe.
Dans l'exemple figure 1, on veut décrire la trajectoire d'une balle lancée dans un train en
mouvement.
On peut définir 2 référentiels :
• Un référentiel lié à la Terre, référentiel d'étude pour l'observatrice fixe placée sur la Terre ;
• Un référentiel lié au train, référentiel d'étude pour l'observateur fixe placé dans le train.
L'étude du mouvement dans ces 2 référentiels conduit à des résultats différents pour la trajectoire de
la balle.
Figure 1 : Lancer d'une balle dans un train en mouvement & trajectoire de la balle selon 2
observateurs placés dans 2 référentiels différents
On peut passer d'une trajectoire à une autre en étudiant le mouvement relatif d'un référentiel
par rapport à un autre. Nommons alors R et R' les 2 référentiels d'étude.
3
Sciences Physiques - Chimie MP
Partie A : Mécanique – Ch.1 : Changements de référentiels
I.2. Mouvement relatif de 2 référentiels
On suppose que les axes des 2 référentiels sont parallèles entre eux à un instant donné. On
étudie alors les 2 cas présentés sur la figure 2 : mouvement de translation et mouvements de rotation
autour d'un axe fixe.
Figure 2 : Mouvement relatif de 2 référentiels
a. Mouvement de translation
Un référentiel R' est en translation par rapport à un référentiel R si leurs axes restent
constamment parallèles. On peut alors définir une vitesse de translation : v⃗ (R ' / R) .
Si le vecteur vitesse est de direction constante, on parle de translation rectiligne.
Si le vecteur vitesse est de norme constante, on parle de translation uniforme.
Pour savoir si on a une translation d'un référentiel par rapport à un autre, il suffit de prendre
un vecteur ⃗ AB sur le solide de référence et de regarder si ce vecteur reste toujours parallèle à lui-
même au cours du temps.
Exemples :
• Dans le cas du train précédent, que peut-on dire du référentiel lié au train par rapport
au ref terrestre ?
• Le ref géocentrique est il en translation par rapport au ref de Copernic ?
• Le ref terrestre est il en translation par rapport au ref géocentrique ?
b. Mouvement de rotation (uniforme) autour d'un axe fixe
La plupart du temps on prendra un référentiel R' tournant autour d'un axe fixe Oz par
rapport au référentiel R.
Le vecteur rotation se note : ⃗ u z =θ˙ ⃗
ω ( R ' / R)=ω .⃗ uz
Dans la suite on n'étudie que les mvts de rotation uniforme, càd à w constant.
Exemples :
• Que peut-on dire du ref terrestre par rapport au ref géocentrique ? Calculer sa vitesse
de rotation. Donner un autre exemple de ref en mvt de rotation autour d'un axe fixe
par rapport à un autre ref.
4
Sciences Physiques - Chimie MP
Partie A : Mécanique – Ch.1 : Changements de référentiels
Nous allons créer les 4 prochaines parties en commun. Toutes les formules sont à connaître
et à savoir redémontrer rapidement. Le mieux pour les apprendre est de les trouver par vous même.
II. Dérivées d'un vecteur selon le référentiel
La vitesse est la dérivée de la position. Typiquement la vitesse de la balle dans le train n'est
pas la même si on se place dans le référentiel terrestre ou dans le référentiel du train.
On va donc faire apparaître le référentiel lors de la dérivation.
d⃗A
Soit un vecteur ⃗ A quelconque. Notons ) sa dérivée dans le référentiel R.
dt R
• On décompose ⃗ A dans le référentiel R', décrit par le repère (O ' , ⃗ u x ' ,⃗
u y ' ,⃗
uz ' ) :
⃗ ⃗ ⃗ ⃗
A=a (t) . u x ' +b(t). u y ' +c(t ). u z '
d⃗
A
Les vecteurs ⃗
ux ' ,⃗
u y ' ,⃗
u z ' ne varient pas dans R', donc ) =a˙ (t). ⃗ ˙
u x ' +b(t). ⃗
u y ' + c˙ (t). ⃗
uz'
dt R '
En revanche, puisque R' est en mvt par rapport à R, les vecteurs ⃗ ux ' ,⃗
u y ' ,⃗
u z ' varient dans R et
⃗ ⃗
d ux ' ⃗
d uy' d⃗uz '
on a : d A ) R=a˙ (t). ⃗ ˙ t). ⃗
u x ' +b( u y ' +c˙ (t) .⃗
u z ' +a (t ). ) R+b (t ). ) R+c (t). )
dt dt dt dt R
Cas 1 : R' est en translation par rapport à R.
Les vecteurs ⃗ ux ' ,⃗
u y ' ,⃗
u z ' ne changent ni de normes, ni de directions, ni de sens donc
d⃗
ux ' d⃗
uy ' d⃗ uz ' d⃗
A d⃗
A
) R= )R = ) R =⃗0 et ) R= )R '
dt dt dt dt dt
Cas 2 : R' est en rotation uniforme autour d'un axe fixe par rapport à R (figure 3).
On prend (Oz) cet axe fixe, et le vecteur rotation est alors : ⃗ ω ( R ' / R)=ω .⃗ u z =θ˙ ⃗
uz
⃗
d uz '
On a : ⃗u z '=⃗
u z et ) =⃗0
dt R
• On décompose ⃗ u x ' et ⃗ u x et ⃗
u y ' sur les vecteurs ⃗ u y suivant la figure 3.
⃗
u x '=cos (θ)⃗ u x +sin (θ)⃗ uy
On a : ⃗
u y '=−sin( θ)⃗ u x +cos (θ)⃗ uy
d⃗ ux '
) =−θ˙ sin (θ)⃗ ˙
u x +θcos (θ)⃗ uy
dt R
Donc :
d⃗ uy'
) =−θ˙ cos (θ) ⃗ ˙
u x−θsin (θ) ⃗ uy
dt R
d⃗
ux '
) =−θ˙ sin (θ)⃗ uy ^ ⃗ u z +θ˙ cos (θ)⃗ uz ^ ⃗
...


, reçois gratuitement 1 exemplaire de test de la TI-82 Advanced Edition Python. À demander d'ici le 31 décembre 2024.")






