
Cours sur forces et moments
File hierarchy
| Downloads | ||||||
| Files created online | (37320) | |||||
| TI-Nspire | (25691) | |||||
| mViewer GX Creator Ndless | (959) | |||||
DownloadTélécharger
Actions
Vote :
ScreenshotAperçu
Informations
Catégorie :Category: mViewer GX Creator Ndless TI-Nspire
Auteur Author: jujviet
Type : Image nécessitant un lecteur
Page(s) : 6
Taille Size: 825.14 Ko KB
Mis en ligne Uploaded: 15/04/2015 - 17:39:30
Uploadeur Uploader: jujviet (Profil)
Téléchargements Downloads: 114
Visibilité Visibility: Archive publique
Shortlink : http://ti-pla.net/a192354
Type : Image nécessitant un lecteur
Page(s) : 6
Taille Size: 825.14 Ko KB
Mis en ligne Uploaded: 15/04/2015 - 17:39:30
Uploadeur Uploader: jujviet (Profil)
Téléchargements Downloads: 114
Visibilité Visibility: Archive publique
Shortlink : http://ti-pla.net/a192354
Description
T
ale ––––– Modélisation des actions mécaniques–––––
Sciences de l’ingénieur
Page 1 sur 6
Modélisation locale et globale
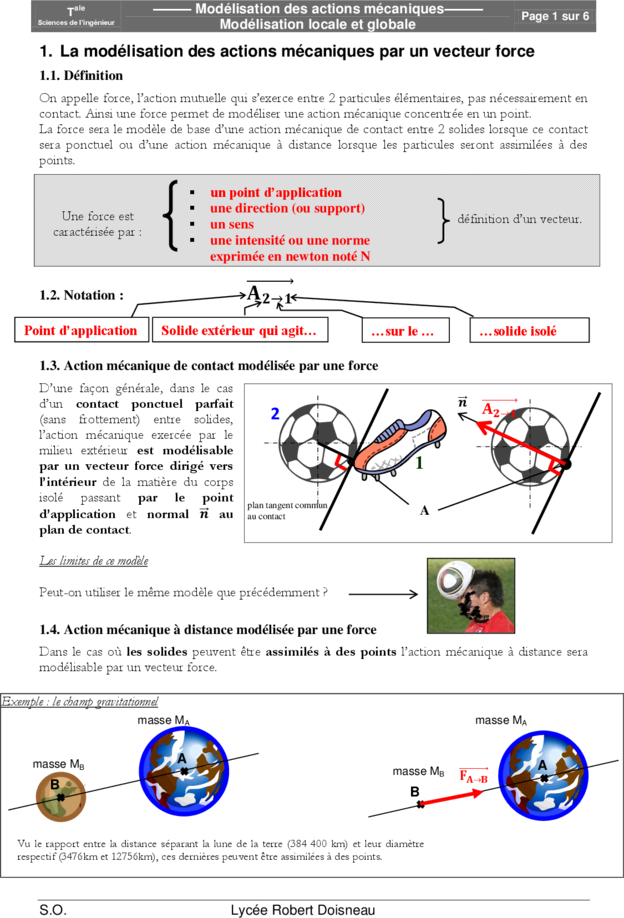
1. La modélisation des actions mécaniques par un vecteur force
1.1. Définition
On appelle force, l’action mutuelle qui s’exerce entre 2 particules élémentaires, pas nécessairement en
contact. Ainsi une force permet de modéliser une action mécanique concentrée en un point.
La force sera le modèle de base d’une action mécanique de contact entre 2 solides lorsque ce contact
sera ponctuel ou d’une action mécanique à distance lorsque les particules seront assimilées à des
points.
un point d’application
une direction (ou support)
Une force est définition d’un vecteur.
un sens
caractérisée par :
une intensité ou une norme
exprimée en newton noté N
1.2. Notation :
Point d’application Solide extérieur qui agit… …sur le … …solide isolé
1.3. Action mécanique de contact modélisée par une force
D’une façon générale, dans le cas
d’un contact ponctuel parfait
(sans frottement) entre solides, 2
l’action mécanique exercée par le
milieu extérieur est modélisable
par un vecteur force dirigé vers 1
l’intérieur de la matière du corps
isolé passant par le point
plan tangent commun
d’application et normal au au contact
A
plan de contact.
Les limites de ce modèle
Peut-on utiliser le même modèle que précédemment ?
1.4. Action mécanique à distance modélisée par une force
Dans le cas où les solides peuvent être assimilés à des points l’action mécanique à distance sera
modélisable par un vecteur force.
Exemple : le champ gravitationnel
masse MA masse MA
masse MB A A
masse MB
B B
Vu le rapport entre la distance séparant la lune de la terre (384 400 km) et leur diamètre
respectif (3476km et 12756km), ces dernières peuvent être assimilées à des points.
S.O. Lycée Robert Doisneau
T
ale ––––– Modélisation des actions mécaniques–––––
Sciences de l’ingénieur
Page 2 sur 6
Modélisation locale et globale
2. Les effets d’une force sur un solide
Considérons deux solides (0 et 1) indéformables sans masse en contact ponctuel parfait.
On se place au tout début du mouvement de 1/0. Le solide 0 ne se déplace pas. Une force extérieure
notée s’exerce sur le solide 1.
2.1. Quel(s) mouvement(s) provoque(nt) la force sur le solide 1 ?
Approche qualitative
1
O F O F
0
La force provoque une translation La force provoque une
selon l’axe .. rotation autour de l’axe .
O O
La force provoque une translation
La force ext 1 ne provoque
selon l’axe .
aucun mouvement.
O F
La force provoque une translation
selon l’axe et une rotation autour
de l’axe .
2.2. Que peut-on conclure ?
Une même force peut mettre les solides :
en mouvement de translation : celle-ci se fera suivant la direction et le sens du vecteur
force, son point d’application n’a pas d’influence sur la translation. Intuitivement, plus la force
est grande plus la translation sera facile.
en mouvement de rotation : celle-ci se fera autour d’un point éloigné du point d’application
du vecteur force. Intuitivement, plus la force et la distance sont grandes plus la rotation sera
facile.
Remarque : une force peut aussi empêcher ces mouvements.
S.O. Lycée Robert Doisneau
T
ale ––––– Modélisation des actions mécaniques–––––
Sciences de l’ingénieur
Page 3 sur 6
Modélisation locale et globale
3. Le moment d’une force
Nous avons vu sur l’exemple précédent que le seul concept de force n’est pas suffisant pour décrire
les phénomènes physiques (notamment la rotation) en tout point du solide. Il faut tenir compte de la
distance entre la force et le point qui nous intéresse.
La quantité qui mesure l’efficacité de la force pour faire tourner (ou
empêcher de tourner) un système matériel autour d’un point (et d’un axe)
est appelée moment de la force.
3.1. Les forces ci-dessous font-elles tourner le solide 1 avec la même efficacité autour de O ?
O F O F
33°
Figure 1 Figure 2
Pour répondre à cette question, il faut quantifier puis comparer l’intensité des moments provoqués
par ces forces.
3.2. Calcul du moment de la force par la méthode du bras de levier
Le moment, au point O, de la force qui agit au point F, qui sera noté , est modélisé
par un vecteur dont :
le point d’application est celui où on veut voir si « ça tourne » O,
la direction est orthogonale au plan formé par la force et la droite (OF) ,
le sens est positif si on tourne dans le sens suivant (-),
l’intensité est donnée par la relation exprimée en Nm (newtonmètre).
d est ce que l’on appelle le bras de levier (Archimède disait : « Donner moi un bras de levier assez
long et un point d’appui, je soulèverai la Terre »).
Il correspond à la plus courte distance entre la direction de la force et le point de calcul du
moment Autrement dit, il s’agit de la perpendiculaire à la direction de la force passant par le point
souhaité.
Application : calculer le moment de la force (100N) au point O pour les deux figures ci-dessus (échelle du dessin 1 :1).
Pour la Figure 1 Pour la Figure 2
soit soit
en Nm en Nm
S.O. Lycée Robert Doisneau
T
ale ––––– Modélisation des actions mécaniques–––––
Sciences de l’ingénieur
Page 4 sur 6
Modélisation locale et globale
3.3. Calcul du moment de la force par le produit vectoriel
Cette méthode de calcul permet de déterminer directement les caractéristiques du vecteur moment
(direction, sens et norme).
Soit une force et le vecteur ,
le vecteur moment s’écrit :
Application : calculer le moment de la force (100N) au point O pour les 2 figures précédentes (échelle du dessin 1 :1)
Pour la Figure 1 Pour la Figure 2
en Nmm
3.4. Représentation du moment de la force
O F
O
4. Différentes façons de modéliser les actions mécaniques
4.1. Modélisation au point de contact (ou modélisation locale)
En supposant que le contact entre le pied gauche et le vélo est petit, l’action mécanique exercée par ce
pied 2 sur le pédalier 1 est modélisable par un vecteur force.
2
3
1 Modélisation en A
A
A
S.O. Lycée Robert Doisneau
T
ale ––––– Modélisation des actions mécaniques–––––
Sciences de l’ingénieur
Page 5 sur 6
Modélisation locale et globale
4.2. Modélisation en tout point de l’espace (ou modélisation globale)
L’ingénieur doit savoir ce qui se passe en tout point d’un solide et du mécanisme. Comment
modéliser alors les effets de toutes les actions mécaniques agissant sur ce solide en tout point ?
Pour notre exemple, lorsque le sportif appuie sur le pédalier en A, celui-ci tourne autour du point B et
va ainsi entraine la roue. Il est évident que la force , du pied sur le pédalier, a aussi un effet au
niveau du centre de la liaison B entre le pédalier 1 et la roue 3. Comment modéliser cette action
mécanique en ce point B ?
Modélisation en B
La force fait tourner
le pédalier autour de B
A B La force ne fait plus
tourner le pédalier autour
de B. Il faut donc rajouter B
un moment autour de B A
pour que les effets de
l’action mécanique de 2
sur 1 soient équivalents.
Remarque : en ce qui concerne le comportement dynamique (mouvement ou équilibre), cette
modélisation est identique à la première. Par contre elle ne nous renseigne plus sur la localisation du
point de contact entre les 2 solides.
4.3. Résultante et moment résultant d’une action mécanique
Pour la plupart des mécanismes, les solides sont soumis à plusieurs forces.
Prenons l’exemple d’un roller 1 en contact avec le sol 0. Chaque roue qui compose le roller sera
considérée en contact ponctuel parfait avec le sol. La modélisation locale suivante peut être utilisée
(figure 3).
A
A
B
Figure 3
C D Figure 4
Nous pouvons aussi modéliser l’action mécanique exercée par le sol sur le roller en un seul point par
exemple le point A (figure 4).
Pour cela il suffit de faire la somme :
de toutes les forces appelée résultante des actions mécaniques
et des moments de chaque force en A appelée moment résultant des actions mécaniques en A
S.O. Lycée Robert Doisneau
T
ale ––––– Modélisation des actions mécaniques–––––
Sciences de l’ingénieur
Page 6 sur 6
Modélisation locale et globale
4.4. Le torseur d’action mécanique
Ainsi toute action mécanique se modélise en un point A quelconque dans un repère par deux
éléments de réduction :
La résultante (des forces)
Le moment résultant
L’outil mathématique qui permet de modéliser une action mécanique s’appelle le torseur
d’action mécanique :
Base d’expression des
vecteurs
Point de
réduction
Résultante Moment
résultante
Cet outil nous permet de modéliser l’action mécanique en n’importe quel autre point B.
Application : écrire le torseur d’action mécanique exercée par l’extérieur sur 1 au point F relatif à la figure 1.
O F
Écrire le torseur d’action mécanique exercée par l’extérieur sur 1 au point O relatif à la figure 2
O F
S.O. Lycée Robert Doisneau
ale ––––– Modélisation des actions mécaniques–––––
Sciences de l’ingénieur
Page 1 sur 6
Modélisation locale et globale
1. La modélisation des actions mécaniques par un vecteur force
1.1. Définition
On appelle force, l’action mutuelle qui s’exerce entre 2 particules élémentaires, pas nécessairement en
contact. Ainsi une force permet de modéliser une action mécanique concentrée en un point.
La force sera le modèle de base d’une action mécanique de contact entre 2 solides lorsque ce contact
sera ponctuel ou d’une action mécanique à distance lorsque les particules seront assimilées à des
points.
un point d’application
une direction (ou support)
Une force est définition d’un vecteur.
un sens
caractérisée par :
une intensité ou une norme
exprimée en newton noté N
1.2. Notation :
Point d’application Solide extérieur qui agit… …sur le … …solide isolé
1.3. Action mécanique de contact modélisée par une force
D’une façon générale, dans le cas
d’un contact ponctuel parfait
(sans frottement) entre solides, 2
l’action mécanique exercée par le
milieu extérieur est modélisable
par un vecteur force dirigé vers 1
l’intérieur de la matière du corps
isolé passant par le point
plan tangent commun
d’application et normal au au contact
A
plan de contact.
Les limites de ce modèle
Peut-on utiliser le même modèle que précédemment ?
1.4. Action mécanique à distance modélisée par une force
Dans le cas où les solides peuvent être assimilés à des points l’action mécanique à distance sera
modélisable par un vecteur force.
Exemple : le champ gravitationnel
masse MA masse MA
masse MB A A
masse MB
B B
Vu le rapport entre la distance séparant la lune de la terre (384 400 km) et leur diamètre
respectif (3476km et 12756km), ces dernières peuvent être assimilées à des points.
S.O. Lycée Robert Doisneau
T
ale ––––– Modélisation des actions mécaniques–––––
Sciences de l’ingénieur
Page 2 sur 6
Modélisation locale et globale
2. Les effets d’une force sur un solide
Considérons deux solides (0 et 1) indéformables sans masse en contact ponctuel parfait.
On se place au tout début du mouvement de 1/0. Le solide 0 ne se déplace pas. Une force extérieure
notée s’exerce sur le solide 1.
2.1. Quel(s) mouvement(s) provoque(nt) la force sur le solide 1 ?
Approche qualitative
1
O F O F
0
La force provoque une translation La force provoque une
selon l’axe .. rotation autour de l’axe .
O O
La force provoque une translation
La force ext 1 ne provoque
selon l’axe .
aucun mouvement.
O F
La force provoque une translation
selon l’axe et une rotation autour
de l’axe .
2.2. Que peut-on conclure ?
Une même force peut mettre les solides :
en mouvement de translation : celle-ci se fera suivant la direction et le sens du vecteur
force, son point d’application n’a pas d’influence sur la translation. Intuitivement, plus la force
est grande plus la translation sera facile.
en mouvement de rotation : celle-ci se fera autour d’un point éloigné du point d’application
du vecteur force. Intuitivement, plus la force et la distance sont grandes plus la rotation sera
facile.
Remarque : une force peut aussi empêcher ces mouvements.
S.O. Lycée Robert Doisneau
T
ale ––––– Modélisation des actions mécaniques–––––
Sciences de l’ingénieur
Page 3 sur 6
Modélisation locale et globale
3. Le moment d’une force
Nous avons vu sur l’exemple précédent que le seul concept de force n’est pas suffisant pour décrire
les phénomènes physiques (notamment la rotation) en tout point du solide. Il faut tenir compte de la
distance entre la force et le point qui nous intéresse.
La quantité qui mesure l’efficacité de la force pour faire tourner (ou
empêcher de tourner) un système matériel autour d’un point (et d’un axe)
est appelée moment de la force.
3.1. Les forces ci-dessous font-elles tourner le solide 1 avec la même efficacité autour de O ?
O F O F
33°
Figure 1 Figure 2
Pour répondre à cette question, il faut quantifier puis comparer l’intensité des moments provoqués
par ces forces.
3.2. Calcul du moment de la force par la méthode du bras de levier
Le moment, au point O, de la force qui agit au point F, qui sera noté , est modélisé
par un vecteur dont :
le point d’application est celui où on veut voir si « ça tourne » O,
la direction est orthogonale au plan formé par la force et la droite (OF) ,
le sens est positif si on tourne dans le sens suivant (-),
l’intensité est donnée par la relation exprimée en Nm (newtonmètre).
d est ce que l’on appelle le bras de levier (Archimède disait : « Donner moi un bras de levier assez
long et un point d’appui, je soulèverai la Terre »).
Il correspond à la plus courte distance entre la direction de la force et le point de calcul du
moment Autrement dit, il s’agit de la perpendiculaire à la direction de la force passant par le point
souhaité.
Application : calculer le moment de la force (100N) au point O pour les deux figures ci-dessus (échelle du dessin 1 :1).
Pour la Figure 1 Pour la Figure 2
soit soit
en Nm en Nm
S.O. Lycée Robert Doisneau
T
ale ––––– Modélisation des actions mécaniques–––––
Sciences de l’ingénieur
Page 4 sur 6
Modélisation locale et globale
3.3. Calcul du moment de la force par le produit vectoriel
Cette méthode de calcul permet de déterminer directement les caractéristiques du vecteur moment
(direction, sens et norme).
Soit une force et le vecteur ,
le vecteur moment s’écrit :
Application : calculer le moment de la force (100N) au point O pour les 2 figures précédentes (échelle du dessin 1 :1)
Pour la Figure 1 Pour la Figure 2
en Nmm
3.4. Représentation du moment de la force
O F
O
4. Différentes façons de modéliser les actions mécaniques
4.1. Modélisation au point de contact (ou modélisation locale)
En supposant que le contact entre le pied gauche et le vélo est petit, l’action mécanique exercée par ce
pied 2 sur le pédalier 1 est modélisable par un vecteur force.
2
3
1 Modélisation en A
A
A
S.O. Lycée Robert Doisneau
T
ale ––––– Modélisation des actions mécaniques–––––
Sciences de l’ingénieur
Page 5 sur 6
Modélisation locale et globale
4.2. Modélisation en tout point de l’espace (ou modélisation globale)
L’ingénieur doit savoir ce qui se passe en tout point d’un solide et du mécanisme. Comment
modéliser alors les effets de toutes les actions mécaniques agissant sur ce solide en tout point ?
Pour notre exemple, lorsque le sportif appuie sur le pédalier en A, celui-ci tourne autour du point B et
va ainsi entraine la roue. Il est évident que la force , du pied sur le pédalier, a aussi un effet au
niveau du centre de la liaison B entre le pédalier 1 et la roue 3. Comment modéliser cette action
mécanique en ce point B ?
Modélisation en B
La force fait tourner
le pédalier autour de B
A B La force ne fait plus
tourner le pédalier autour
de B. Il faut donc rajouter B
un moment autour de B A
pour que les effets de
l’action mécanique de 2
sur 1 soient équivalents.
Remarque : en ce qui concerne le comportement dynamique (mouvement ou équilibre), cette
modélisation est identique à la première. Par contre elle ne nous renseigne plus sur la localisation du
point de contact entre les 2 solides.
4.3. Résultante et moment résultant d’une action mécanique
Pour la plupart des mécanismes, les solides sont soumis à plusieurs forces.
Prenons l’exemple d’un roller 1 en contact avec le sol 0. Chaque roue qui compose le roller sera
considérée en contact ponctuel parfait avec le sol. La modélisation locale suivante peut être utilisée
(figure 3).
A
A
B
Figure 3
C D Figure 4
Nous pouvons aussi modéliser l’action mécanique exercée par le sol sur le roller en un seul point par
exemple le point A (figure 4).
Pour cela il suffit de faire la somme :
de toutes les forces appelée résultante des actions mécaniques
et des moments de chaque force en A appelée moment résultant des actions mécaniques en A
S.O. Lycée Robert Doisneau
T
ale ––––– Modélisation des actions mécaniques–––––
Sciences de l’ingénieur
Page 6 sur 6
Modélisation locale et globale
4.4. Le torseur d’action mécanique
Ainsi toute action mécanique se modélise en un point A quelconque dans un repère par deux
éléments de réduction :
La résultante (des forces)
Le moment résultant
L’outil mathématique qui permet de modéliser une action mécanique s’appelle le torseur
d’action mécanique :
Base d’expression des
vecteurs
Point de
réduction
Résultante Moment
résultante
Cet outil nous permet de modéliser l’action mécanique en n’importe quel autre point B.
Application : écrire le torseur d’action mécanique exercée par l’extérieur sur 1 au point F relatif à la figure 1.
O F
Écrire le torseur d’action mécanique exercée par l’extérieur sur 1 au point O relatif à la figure 2
O F
S.O. Lycée Robert Doisneau


, reçois gratuitement 1 exemplaire de test de la TI-82 Advanced Edition Python. À demander d'ici le 31 décembre 2024.")





