
Les liaisons mécaniques
DownloadTélécharger
Actions
Vote :
ScreenshotAperçu
Informations
Catégorie :Category: mViewer GX Creator Lua TI-Nspire
Auteur Author: katia lgbr
Type : Classeur 3.6
Page(s) : 1
Taille Size: 137.55 Ko KB
Mis en ligne Uploaded: 13/04/2015 - 07:58:39
Uploadeur Uploader: katia lgbr (Profil)
Téléchargements Downloads: 1942
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a189745
Type : Classeur 3.6
Page(s) : 1
Taille Size: 137.55 Ko KB
Mis en ligne Uploaded: 13/04/2015 - 07:58:39
Uploadeur Uploader: katia lgbr (Profil)
Téléchargements Downloads: 1942
Visibilité Visibility: Archive publique
Shortlink : https://tipla.net/a189745
Description
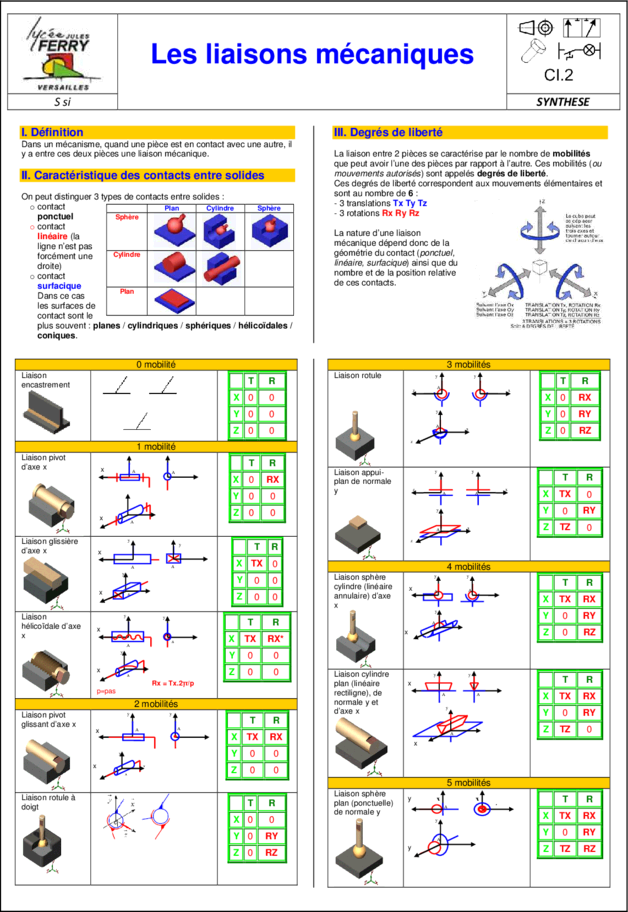
Les liaisons mécaniques
S si SYNTHESE
I. Définition III. Degrés de liberté
Dans un mécanisme, quand une pièce est en contact avec une autre, il
y a entre ces deux pièces une liaison mécanique. La liaison entre 2 pièces se caractérise par le nombre de mobilités
que peut avoir l’une des pièces par rapport à l’autre. Ces mobilités (ou
II. Caractéristique des contacts entre solides mouvements autorisés) sont appelés degrés de liberté.
Ces degrés de liberté correspondent aux mouvements élémentaires et
On peut distinguer 3 types de contacts entre solides : sont au nombre de 6 :
o contact - 3 translations Tx Ty Tz
Plan Cylindre Sphère
ponctuel Sphère - 3 rotations Rx Ry Rz
o contact
linéaire (la La nature d’une liaison
ligne n’est pas mécanique dépend donc de la
forcément une Cylindre géométrie du contact (ponctuel,
droite) linéaire, surfacique) ainsi que du
o contact nombre et de la position relative
surfacique de ces contacts.
Plan
Dans ce cas
les surfaces de
contact sont le
plus souvent : planes / cylindriques / sphériques / hélicoïdales /
coniques.
0 mobilité 3 mobilités
Liaison Liaison rotule y y
encastrement T R T R
A
z x
X 0 0 X 0 RX
y
Y 0 0 Y 0 RY
A
Z 0 0 x
Z 0 RZ
z
1 mobilité
Liaison pivot
d’axe x T R
x A A Liaison appui- y y
X 0 RX plan de normale T R
y z x
Y 0 0 A A X TX 0
Z 0 0 y
Y 0 RY
x A
A x Z TZ 0
Liaison glissière y
y
z
d’axe x xz
T R
A A X TX 0 4 mobilités
y
Y 0 0 Liaison sphère y y
cylindre (linéaire T R
x A
x A
A
Z 0 0 annulaire) d’axe
X TX RX
x
y
Liaison y y Y 0 RY
hélicoïdale d’axe T R A
x
x x Z 0 RZ
A X TX RX*
A
y
Y 0 0
x Z 0 0
A Liaison cylindre y y
Rx = Tx.2π/p plan (linéaire x T R
p=pas rectiligne), de A A
X TX RX
2 mobilités normale y et
y
Liaison pivot y y d’axe x Y 0 RY
glissant d’axe x T R
x A A
A
Z TZ 0
X TX RX
x
y Y 0 0
x x
A
Z 0 0
5 mobilités
Liaison sphère
Liaison rotule à y y y T R
doigt T R plan (ponctuelle)
de normale y z
A
A x X TX RX
X 0 0 y
Y 0 RY Y 0 RY
A
y Z TZ RZ
Z 0 RZ
S si SYNTHESE
I. Définition III. Degrés de liberté
Dans un mécanisme, quand une pièce est en contact avec une autre, il
y a entre ces deux pièces une liaison mécanique. La liaison entre 2 pièces se caractérise par le nombre de mobilités
que peut avoir l’une des pièces par rapport à l’autre. Ces mobilités (ou
II. Caractéristique des contacts entre solides mouvements autorisés) sont appelés degrés de liberté.
Ces degrés de liberté correspondent aux mouvements élémentaires et
On peut distinguer 3 types de contacts entre solides : sont au nombre de 6 :
o contact - 3 translations Tx Ty Tz
Plan Cylindre Sphère
ponctuel Sphère - 3 rotations Rx Ry Rz
o contact
linéaire (la La nature d’une liaison
ligne n’est pas mécanique dépend donc de la
forcément une Cylindre géométrie du contact (ponctuel,
droite) linéaire, surfacique) ainsi que du
o contact nombre et de la position relative
surfacique de ces contacts.
Plan
Dans ce cas
les surfaces de
contact sont le
plus souvent : planes / cylindriques / sphériques / hélicoïdales /
coniques.
0 mobilité 3 mobilités
Liaison Liaison rotule y y
encastrement T R T R
A
z x
X 0 0 X 0 RX
y
Y 0 0 Y 0 RY
A
Z 0 0 x
Z 0 RZ
z
1 mobilité
Liaison pivot
d’axe x T R
x A A Liaison appui- y y
X 0 RX plan de normale T R
y z x
Y 0 0 A A X TX 0
Z 0 0 y
Y 0 RY
x A
A x Z TZ 0
Liaison glissière y
y
z
d’axe x xz
T R
A A X TX 0 4 mobilités
y
Y 0 0 Liaison sphère y y
cylindre (linéaire T R
x A
x A
A
Z 0 0 annulaire) d’axe
X TX RX
x
y
Liaison y y Y 0 RY
hélicoïdale d’axe T R A
x
x x Z 0 RZ
A X TX RX*
A
y
Y 0 0
x Z 0 0
A Liaison cylindre y y
Rx = Tx.2π/p plan (linéaire x T R
p=pas rectiligne), de A A
X TX RX
2 mobilités normale y et
y
Liaison pivot y y d’axe x Y 0 RY
glissant d’axe x T R
x A A
A
Z TZ 0
X TX RX
x
y Y 0 0
x x
A
Z 0 0
5 mobilités
Liaison sphère
Liaison rotule à y y y T R
doigt T R plan (ponctuelle)
de normale y z
A
A x X TX RX
X 0 0 y
Y 0 RY Y 0 RY
A
y Z TZ RZ
Z 0 RZ


, reçois gratuitement 1 exemplaire de test de la TI-82 Advanced Edition Python. À demander d'ici le 31 décembre 2024.")





